












 AI智能应用开发
AI智能应用开发 AI大模型开发(Python)
AI大模型开发(Python) AI鸿蒙开发
AI鸿蒙开发 AI嵌入式+机器人开发
AI嵌入式+机器人开发 AI运维
AI运维 AI测试
AI测试 跨境电商运营
跨境电商运营 AI设计
AI设计 AI视频创作与直播运营
AI视频创作与直播运营 微短剧拍摄剪辑
微短剧拍摄剪辑 C/C++
C/C++ 狂野架构师
狂野架构师


SSD的多尺度特征图的网络结构有哪些?
更新时间:2023年03月06日11时35分 来源:传智教育 浏览次数:

SSD算法的全名是Single Shot MultiBox Detector,Single shot指明了SSD算法属于one-stage方法,MultiBox指明了SSD是多框预测。对于Faster R-CNN,先通过CNN得到候选框,然后进行分类和回归,而YOLO和SSD可以一步完成检测,SSD的特点是:
SSD提取了不同尺度的特征图来做检测,大尺度特征图可以用来检测小物体,而小特征图用来检测大物体;
SSD采用了不同尺度和长宽比的先验框,在faster r-cnn和yoloV2,V3中称为Anchors。
SSD是YOLO V1出来后,YOLO V2出来前的一款One-stage目标检测器。SSD用到了多尺度的特征图,在之后的YOLO V3的darknet53中,也是用到了多尺度特征图的思想。较浅层的特征图上,每个cell的感受野不是很大,所以适合检测较小的物体,而在较深的特征图上,每个cell的感受野就比较大了,适合检测较大的物体。
SSD采用VGG16作为基础模型,然后在VGG16的基础上新增了卷积层来获得更多的特征图以用于检测。如下图所示:
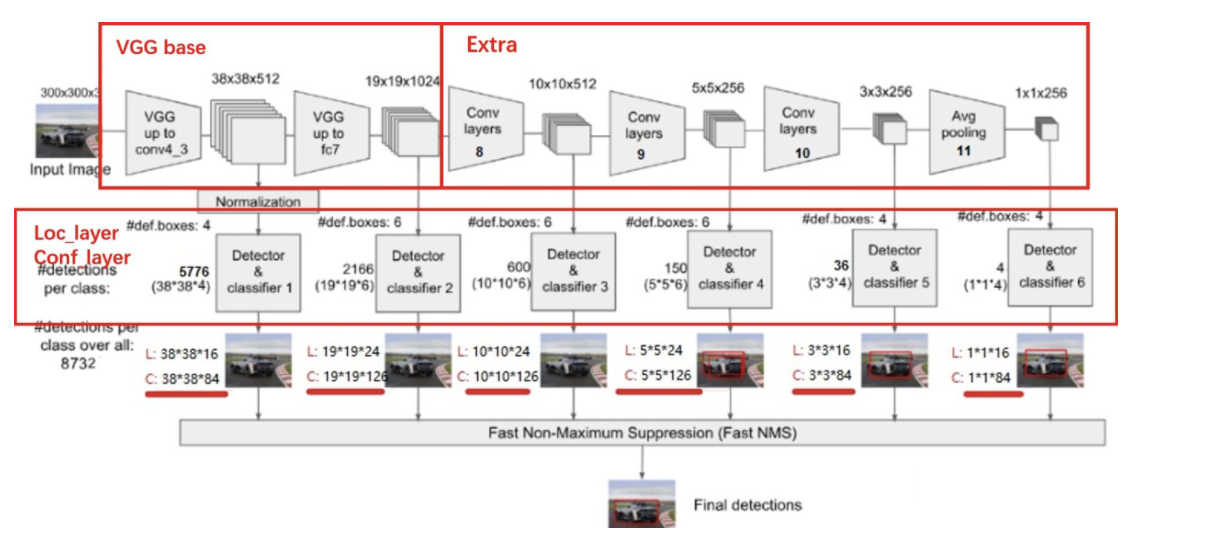
整个特征图分为三部分:
backbone: VGGnet用于图片特征提取的网络。
Extra: 用于引出多尺度特征图的网络。
Loc和cls: 用于框位置回归和目标分类的网络。
最新资讯








江苏传智播客教育科技股份有限公司 版权所有Copyright 2006-2024 All
Rights Reserved
苏ICP备16007882号营业执照增值电信业务经营许可证出版物经营许可证 苏公网安备 32132202001156号
苏公网安备 32132202001156号
免费领取黑马程序员AI通道专属星级课程资料
